系統(tǒng)狀態(tài)空間表達式與矩陣系統(tǒng)
系統(tǒng)狀態(tài)空間表達式是現(xiàn)代控制理論中描述動態(tài)系統(tǒng)的一種重要方法,它通過矩陣形式將系統(tǒng)的輸入、狀態(tài)和輸出之間的關系進行建模,特別適用于多輸入多輸出系統(tǒng)。
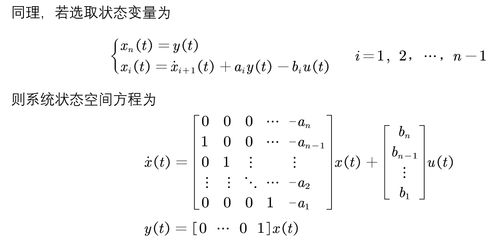
狀態(tài)空間表達式通常由兩個方程組成:狀態(tài)方程和輸出方程。狀態(tài)方程描述了系統(tǒng)狀態(tài)隨時間變化的動態(tài)行為,其一般形式為:
?(t) = A·x(t) + B·u(t)
其中,x(t) 是系統(tǒng)的狀態(tài)向量,代表系統(tǒng)在時刻 t 的內(nèi)部狀態(tài);u(t) 是輸入向量,表示系統(tǒng)的外部激勵;A 是系統(tǒng)矩陣,它決定了系統(tǒng)狀態(tài)的自由演化特性;B 是輸入矩陣,描述了輸入如何影響系統(tǒng)狀態(tài)的變化。
輸出方程則定義了系統(tǒng)輸出與狀態(tài)、輸入之間的關系:
y(t) = C·x(t) + D·u(t)
這里,y(t) 是系統(tǒng)的輸出向量;C 是輸出矩陣,它決定了哪些狀態(tài)變量被觀測為輸出;D 是直饋矩陣,表示輸入對輸出的直接影響。
在矩陣系統(tǒng)表示中,這四個矩陣(A、B、C、D)共同構成了系統(tǒng)的完整數(shù)學模型。這種表示方法具有以下優(yōu)勢:
1. 能夠處理多變量系統(tǒng),不受限于單輸入單輸出系統(tǒng)
2. 提供了系統(tǒng)內(nèi)部狀態(tài)的完整描述,便于分析系統(tǒng)的可控性和可觀性
3. 適用于時變和非線性系統(tǒng)的線性化分析
4. 便于計算機仿真和數(shù)值計算
5. 為現(xiàn)代控制理論中的狀態(tài)反饋、觀測器設計等提供了理論基礎
在實際應用中,狀態(tài)空間表達式廣泛應用于航空航天、機器人控制、工業(yè)過程控制等領域。通過分析系統(tǒng)矩陣的特征值和特征向量,可以判斷系統(tǒng)的穩(wěn)定性;通過檢驗可控性矩陣和可觀性矩陣,可以確定系統(tǒng)是否能夠通過適當控制實現(xiàn)期望性能。
系統(tǒng)狀態(tài)空間表達式作為一種強大的數(shù)學工具,為復雜動態(tài)系統(tǒng)的分析、設計和控制提供了系統(tǒng)化、矩陣化的解決方案。
如若轉(zhuǎn)載,請注明出處:http://www.g8995.cn/product/224.html
更新時間:2026-04-07 06:20:15